發布日期:2018-03-01 15:10:03
近日,哈佛大學的研究人員開發出了一個平臺,用于創建帶嵌入式傳感器的3D打印柔性機器人,這些傳感器可以檢測運動、壓力、觸摸和溫度。研究人員稱其為軟機器人領域的“基礎性進展”。
兩所世界領先的研究機構并不常常存在于同一所大學。但是,大多數大學不像哈佛大學那樣,John A. Paulson工程與應用科學學院(SEAS)和Wyss生物啟發工程研究所最近聯手開發了用于創建軟機器人的3D打印平臺。此前,哈佛大學的研究人員已經能夠構建可以執行各種功能的軟式機器人:游泳、拿著物體,甚至協助人類心跳。然而,沒有一個能夠充分地理解和響應外部刺激。
哈佛研發的新型3D打印平臺改變了這一切,使科學家們能夠創造可感知運動、壓力、觸覺和溫度的柔性機器人。這對軟機器人領域來說是一個巨大的飛躍,也是增材制造技術的一個非常令人興奮的應用。“我們的研究代表了軟機器人技術的基礎性進展,”研究論文的第一作者Ryan Truby評論道。“我們的制造平臺能夠將復雜的傳感圖案輕松集成到柔性機器人系統中。”
該過程的秘訣是傳感器自身的3D打印,這是由有機離子液體導電油墨制成的。這種油墨可以在機器人的柔軟的彈性體基體中3D打印,并且使傳感器變軟,之前它們是剛性的。

“迄今為止,用于軟機器人的大多數集成傳感器/執行器系統已經非常簡單,”SEAS的前博士后研究員兼論文合著者Michael Wehner說。“通過在這些軟系統中直接打印離子液體傳感器,我們為設備設計和制造開辟了新的途徑,最終將允許對軟機器人進行真正的閉環控制。”
該過程涉及使用嵌入式3D打印技術,這是由Wyss研究所的Jennifer A. Lewis開創的技術。“這種方法的功能和設計靈活性是無與倫比的,”Truby說。“這種新型油墨與我們的嵌入式3D打印工藝相結合,使我們能夠在一個集成式柔性機器人系統中結合軟感應和驅動。”
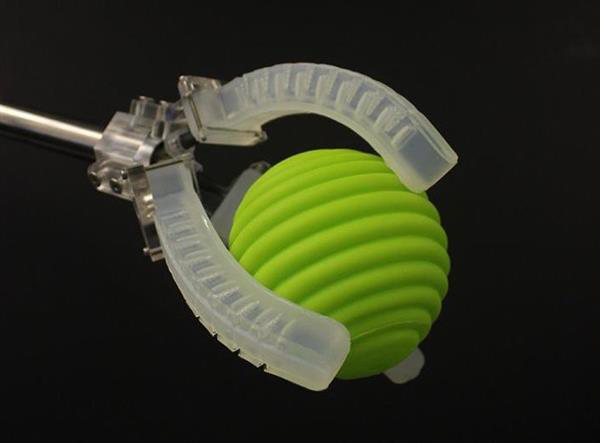
哈佛大學的研究人員測試了他們的3D打印平臺,他們通過制造一個柔軟的機器人抓手來測試充氣壓力、曲率、觸摸和溫度,他們說他們的新工藝可以“改變機器人的創造方式”。他們現在計劃嘗試機器學習來改進軟機器人設備。
據悉,標題為“通過嵌入式3D打印創建柔軟體感執行器”的研究論文已發表在Advanced Materials雜志上。
本文轉載自:中國3D打印網 版權歸中國3D打印網