Date:2018-05-15 08:17:53
對于工人來說,組裝家具是一件極其簡單的工作,但如何讓機器人來組裝家具那就是一件比較復(fù)雜的事了。 經(jīng)過三年的研究,來自南洋理工大學(xué)的機械和航空航天工程學(xué)院已經(jīng)開發(fā)出一種自動化家具組裝機器人,該機器人由兩個機械臂和夾具以及一個3D攝像頭組成。上個月,由FranciscoSuárez-Ruiz博士,大學(xué)校友Xian Zhou和助理教授Quang-Cuong Pham組成的NTU團(tuán)隊在科學(xué)機器人雜志上發(fā)表了一篇關(guān)于他們的機器人結(jié)果的論文,標(biāo)題為“機器人如何制造宜家椅子?“這些研究得到了新加坡教育部、新加坡 麻省理工學(xué)院研究與技術(shù)聯(lián)盟(SMART)以及南洋理工大學(xué)(NTU)創(chuàng)新和企業(yè)部門NTUitive的資助。
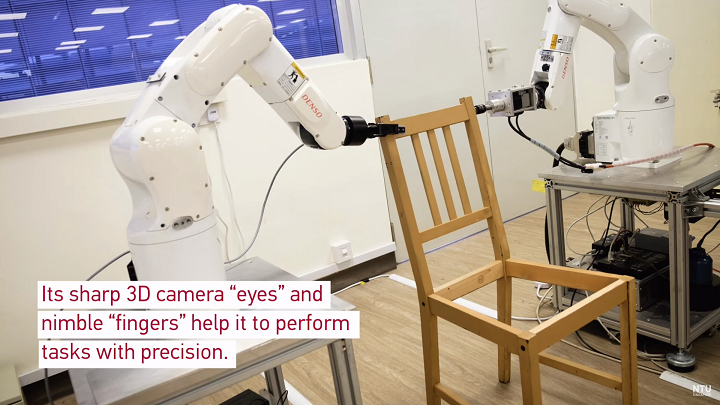

首先,機器人將部件的3D照片展開,以便快速處理他們在地面上估計位置的可靠地圖。根據(jù)NTU的說法,這有助于復(fù)制“人類解放后的混亂環(huán)境,并準(zhǔn)備將自己制作的座椅放在一起”。來自三個開源庫的編碼算法,由團(tuán)隊設(shè)計,幫助機器人用“雙手”計劃一個快速,無碰撞的運動,這個“雙手”也集成了觸覺和視覺感知。機器人手臂用于抓取碎片和執(zhí)行簡單任務(wù)的力量,如插入那些小木塞,必須加以調(diào)整。正如Pham教授所解釋的那樣,這很難做到,因為工業(yè)機器人在精確定位上比在力量調(diào)節(jié)方面更好。

Pham教授表示,直到目前為止,靈巧操縱的自主演示只能用于更多“基本任務(wù)”。“一個原因可能是人類環(huán)境中復(fù)雜的操作任務(wù)需要許多不同的技能,”Pham教授解釋說。 “這包括能夠繪制物品的確切位置,規(guī)劃無碰撞的運動路徑,并控制所需的力量。在這些技能之上,你必須能夠管理他們之間復(fù)雜的相互作用。“
現(xiàn)在他們已經(jīng)達(dá)到了展示機器人建立宜家椅子能力的目標(biāo),該團(tuán)隊正在與各家公司合作,將這種類型的操作應(yīng)用于多個行業(yè)。例如,他們目前正在為機器人準(zhǔn)備用于玻璃粘接的工作,這在汽車應(yīng)用中很有用。
本文轉(zhuǎn)載自:中國3D打印網(wǎng) 版權(quán)歸原作者所有